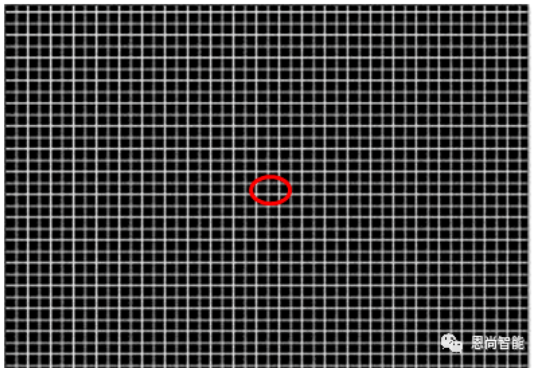
主要指的是:仓库中的物料与物料之间的距离很小。
目的是在有限的空间内,存放尽可能多的物料。
因此,某种程度上,很多自动化存储系统不应该叫做密集存储,比如传统自动化立体仓库。
传统自动化立体仓库重点是在于高,在于提高高度空间的利用率。而真正的密集存储讲究的是物与物之间空间够小,够密。
如果给定一个空间,最密的密集存储是将空间内全部放置物料,将空气完全排除去。

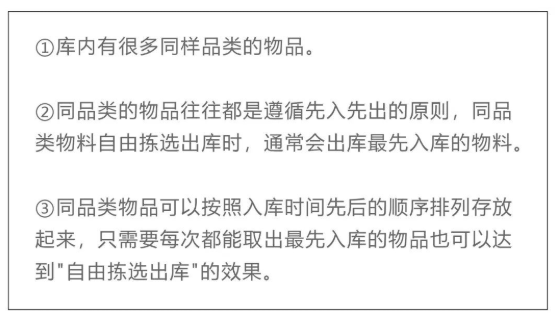
其实,在传统的人工仓库中,人们为了尽可能多的存放物料,采用的就是密集存储的方式。

但是,带来的问题是,位于密集存储区的中间的物料无法自由被出库,即人们说的无法自由拣选出库。
不过,人们在每天的出库和入库过程中发现:
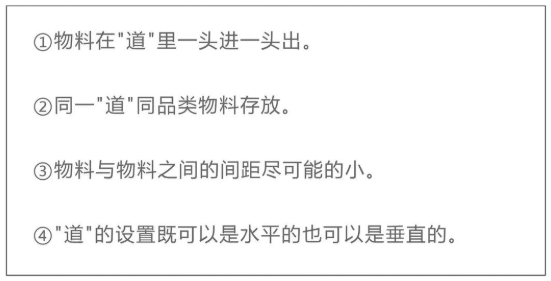
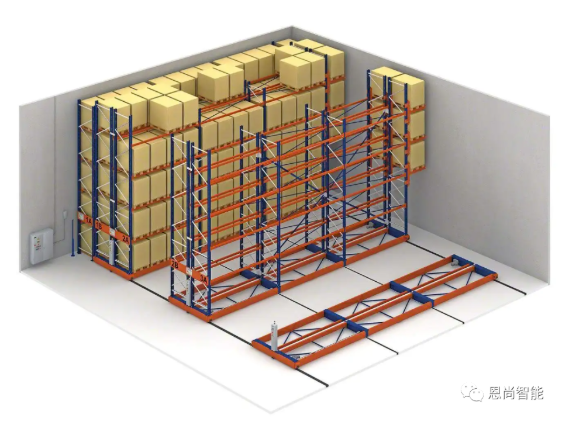
要能达到物料与物料之间的间隙足够小,足够密集,则需要尽量减少通道的配置;同时要保证同类物品能按照时间顺序进行进出,最自然的方式就是采用同品类物料按照"道"的方式进行存储:




比如:
▶需要人驾驶叉车将货物从货架的两段进行存取,越高的位置,存取时越麻烦。
▶货物被人工放置过程中,对货物的信息跟踪和出入库记录仍旧无法实现自动化。
▶密集存放的机械结构一旦发生故障后,会影响整“道”的出入库,系统不够灵活。

在1993年,全球首个托盘穿梭板由瑞典的EAB公司正式发布的,当时命名为“Radio Shuttle”。
 xxxx
xxxx
穿梭板的应用第一次将密集存储系统中的存储功能和搬运功能分割开来,由搬运单元穿梭板负责在密集各巷道内的入、出、存,取的动作。
穿梭板可以在货物的底部穿行,减少通道数量,实现密集存储。

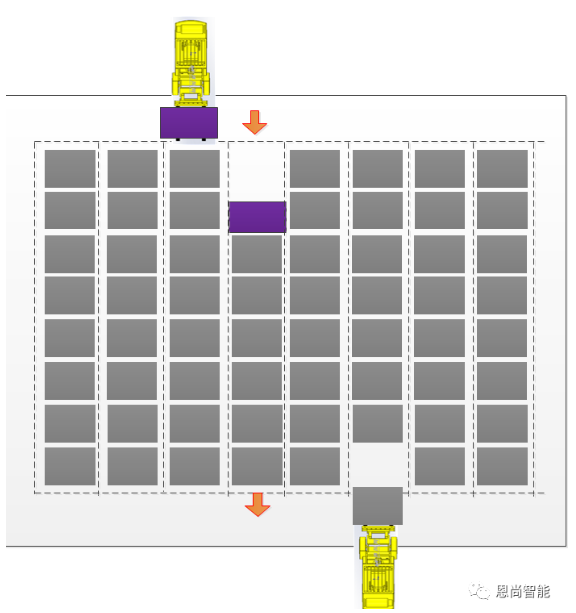






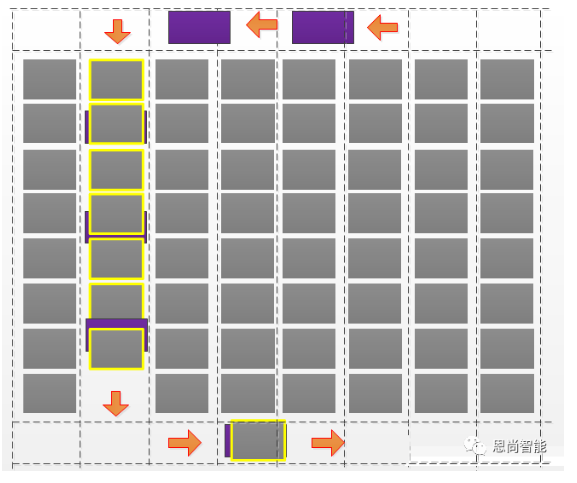
上边提及的例子中的10个托盘要出库,则所有的四向穿梭板都可以依此前后将本道10个托盘移动出库。
与其他智能物流系统一样,未来的密集存储系统一定也会朝着柔性化,模块化和高度智能化的方向演进。
而作为密集存储的各类搬运机器人,也会朝着更加精巧,更加快速,更加灵活的方向发展,同时搬运机器人也可以将功能区从存储区一直延展到其他更多的功能区。
谈起密集,自然而言的,内含的核心在于“存”,因此更加适合“托盘”类的业务场景,事实也是如此。
而对于料箱类的小件物料,更加在于“流通”和“暂存”,因此料箱类的核心在于快速的周转和供拣选用的出入库。
而随着用地成本的上升和一些工艺上的要求,也出现了一些料箱类的密集存储方式,比如:

再比如:

不过这些料箱的密集存储方式更加要注重的是为拣选用的出入库的准确性和高效性。